








隨著城市車輛數(shù)量激增,傳統(tǒng)停車場(chǎng)管理面臨效率低下、資源浪費(fèi)等問(wèn)題。超聲波傳感器通過(guò)實(shí)時(shí)監(jiān)測(cè)車位狀態(tài),能夠顯著提升停車效率和車位管理水平。

超聲波傳感器基于聲波反射原理,發(fā)射器發(fā)出高頻超聲波脈沖,遇到障礙物(如車輛)后反射回接收器。通過(guò)計(jì)算聲波往返時(shí)間差,系統(tǒng)精確測(cè)定距離。當(dāng)車輛停入車位時(shí),傳感器檢測(cè)到距離變化,觸發(fā)狀態(tài)更新。這種非接觸式測(cè)量避免了物理磨損,適用于復(fù)雜環(huán)境。
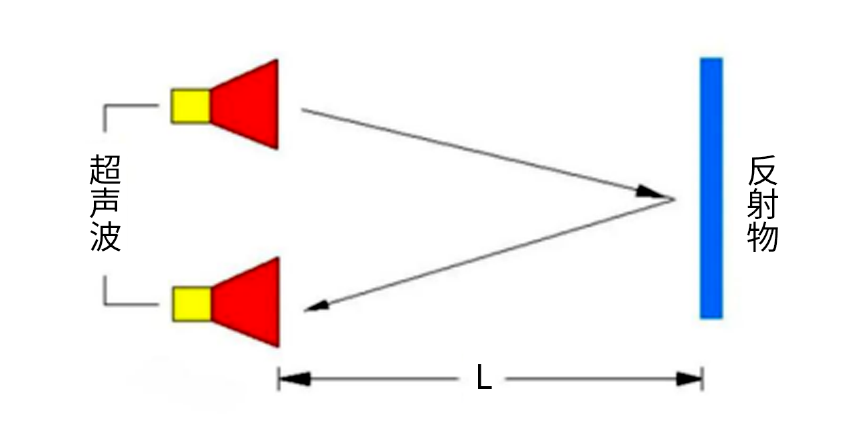
智能停車系統(tǒng)通過(guò)預(yù)設(shè)閾值判斷車位狀態(tài),若傳感器發(fā)射的超聲波在預(yù)設(shè)范圍內(nèi)“暢行”,則判定車位空閑;反之,超聲波在預(yù)設(shè)范圍內(nèi)“遇阻”,則判定有車。結(jié)果通過(guò)指示燈(黃燈表示有車,綠燈表示空閑)和中央顯示屏實(shí)時(shí)反饋,確保車主和管理員即使獲取信息。
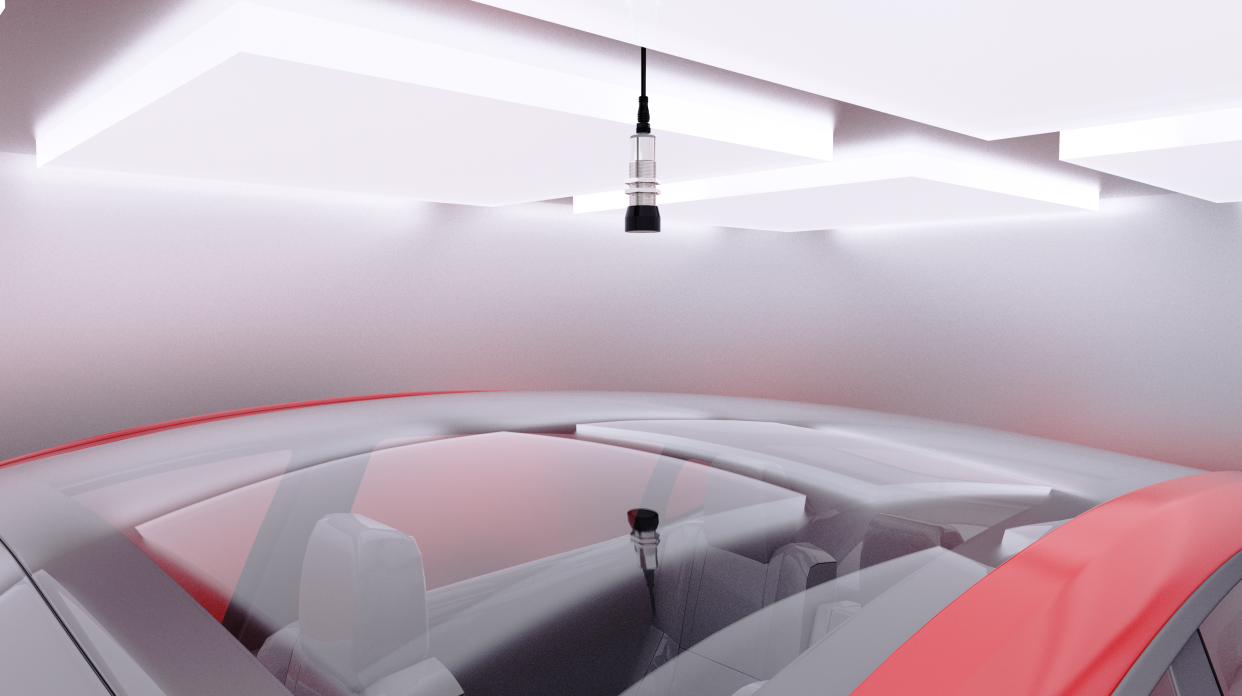
為應(yīng)對(duì)墻壁、地面、鄰車等引起的多路徑反射干擾,除了注意安裝位置外,超聲波傳感器還采用時(shí)間門控、波束成形等核心算法來(lái)降低檢測(cè)誤差。選擇傳感器時(shí),應(yīng)盡可能選擇波束角小的傳感器,避免因波束角過(guò)大在檢測(cè)時(shí)造成誤檢。同時(shí),利用超聲波傳感器的同步功能,即傳感器并排安裝也不會(huì)被互相發(fā)出的聲波影響,通過(guò)安裝多傳感器協(xié)同作業(yè),降低由于其他障礙物引起的誤判。
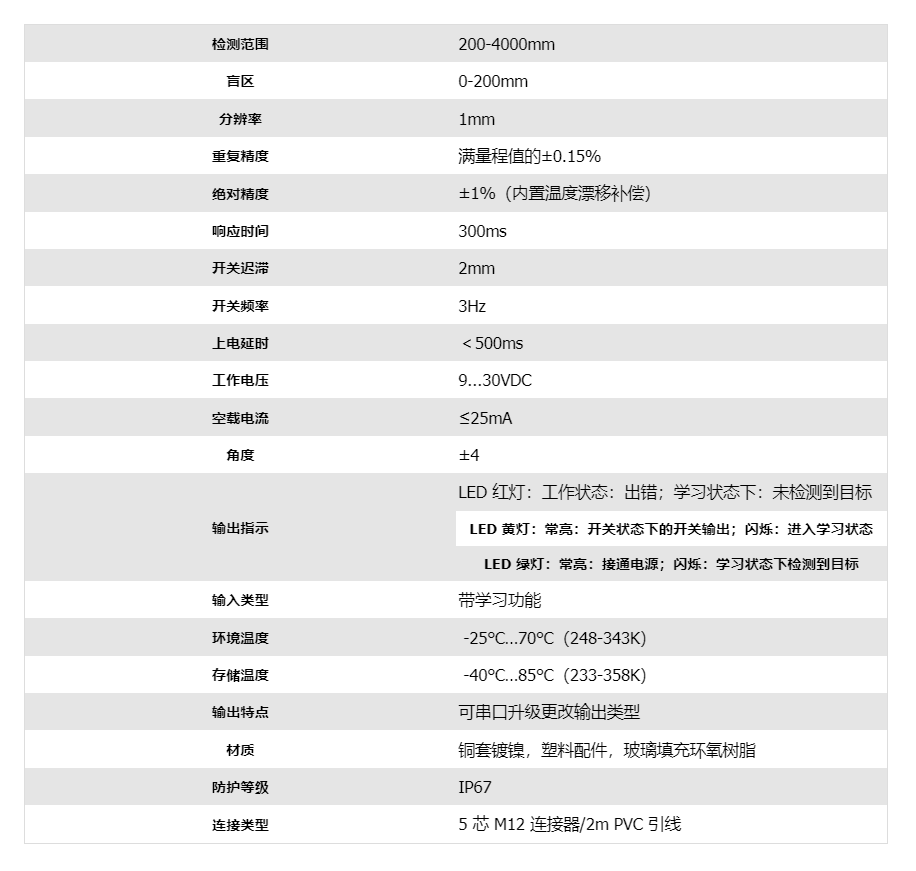
蘭寶超聲波傳感器UR30-CM4

超聲波傳感器以其精確性和可靠性,成為現(xiàn)代車庫(kù)管理的革新力量。首先,它優(yōu)化停車流程,減少車主尋找車位的時(shí)間,提升用戶體驗(yàn)。其次,通過(guò)多傳感器的數(shù)據(jù)整合,智能停車系統(tǒng)實(shí)現(xiàn)了車位資源的高效分配。同時(shí)也有效降低人工成本,提高運(yùn)營(yíng)效率。從提升日常停車效率到支持宏觀交通規(guī)劃,超聲波傳感器的應(yīng)用價(jià)值日益凸顯,為智慧交通的長(zhǎng)遠(yuǎn)發(fā)展提供了關(guān)鍵技術(shù)支持。






